/P 82 0 R /P 213 0 R 254 0 obj << /K [ 27 ] << /P 82 0 R /S /H2 190 0 obj /Pg 49 0 R /QuickPDFF490a3983 14 0 R /P 182 0 R /Pg 71 0 R /K [ 14 ] /S /TD << 105 0 obj >> /Pg 30 0 R /P 82 0 R endobj /S /P /P 202 0 R /S /P << >> /F8 22 0 R /K [ 187 0 R ] 202 0 obj /P 82 0 R 231 0 obj Each finger then corresponds to an axis: By orienting your thumb and index finger to follow the z and x axis of the robot joint, your middle finger will naturally fall into the direction of the y-axis. 246 0 obj /K [ 20 ] offers. /Pg 71 0 R ';)j << /Nums [ 0 84 0 R 1 88 0 R 2 92 0 R 3 163 0 R 4 252 0 R 5 269 0 R ] endobj endobj /Pg 49 0 R endobj /Pg 69 0 R 228 0 obj /S /P << << 154 0 R 161 0 R 162 0 R 164 0 R 225 0 R 226 0 R 227 0 R 248 0 R 249 0 R 250 0 R 251 0 R /P 82 0 R >> Though this might seem a bit "playschool", it can be very helpful as you can position the sculpture next to the physical robot to make sure you've got the axes pointing in the right direction. [ 144 0 R 145 0 R 146 0 R 147 0 R 148 0 R 149 0 R 150 0 R 151 0 R 152 0 R 153 0 R endobj
/P 101 0 R /Pg 76 0 R 162 0 obj /Pg 76 0 R >> /Pg 71 0 R Y&gf_omF8fb-d-EdQkx%lUt5'@. endobj /Type /Pages 199 0 obj /S /Span 201 0 obj /P 82 0 R << << /K [ 37 ] 159 0 obj >> /K 66 endobj /Pg 30 0 R /K [ 10 ] 279 0 obj /S /P 166 0 obj It would have been really helpful to have a step-by-step guide of which stages to go through. In this week's news mix: UR and Philips Corp. announce distributor agreement, ABI Research predicts huge growth History was made in New-York City yesterday when a Robotiq 2F-85 Adaptive Gripper teamed-up with a UR5e robot arm from Alex Owen-Hill is a freelance writer and public speaker who blogs about a large range of topics, including science, presentation skills at CreateClarifyArticulate.com, storytelling and (of course) robotics. As a recovering academic, he maintains a firm foot in the robotics world by blogging about industrial robotics. 282 0 obj /FitWindow false %
179 0 obj /Pg 49 0 R trajectory 3dof /K [ 50 ] /P 93 0 R endobj 281 0 R 281 0 R 281 0 R 281 0 R 281 0 R 281 0 R 281 0 R 284 0 R 283 0 R ] >> /Pg 30 0 R /K [ 54 ] /Pg 49 0 R 214 0 obj /S /Span >> /S /H2 /P 227 0 R << /QuickPDFF52201bee 66 0 R We figure out from side view that d1 = d4 + d5. /Pg 49 0 R 249 0 obj /S /TR \GRH1*?_LDCz^)) /P 213 0 R 136 0 obj /S /P endobj >> 226 0 obj /Pg 76 0 R /K [ 1 ] The DH approach is the most common approach to Forward Kinematics, but it's not perfect. >> /K [ 279 0 R ] 154 0 obj /Pg 49 0 R >> To use it, hold out your right hand in front of you, sticking out your thumb, index finger, and middle finger at 90 degrees to each other. 108 0 R 110 0 R 111 0 R 113 0 R 114 0 R 116 0 R 117 0 R ] /P 82 0 R >> /P 82 0 R /K [ 4 ] 266 0 obj /P 213 0 R A sort of kinematics "cheat sheet" would have been useful. /K [ 99 0 R ] << endobj /Pg 49 0 R << /S /P << /K [ 13 ] 232 0 obj /K [ 214 0 R 216 0 R 218 0 R 220 0 R 222 0 R 224 0 R ] A1fy+ooN Ry3AbBdIr_9Kjnpm"s}O. /Pg 30 0 R endobj /Pg 49 0 R << /P 170 0 R endobj << >> /F1 5 0 R 229 0 obj /K [ 1 ] Introduction to Robot Geometry and Kinematics, Innovative design and control of robotic manipulator for chemically aggressive environments, A Screw Syzygy with Applications to Robot Singularity Computation, Kinematic Modeling and Workspace Generation for a New Parallel Robot Used in Minimally Invasive Surgery, Transitions between Multiple Solutions of the Direct Kinematic Problem, Singularity Free Path Planning for Parallel Robots, Singularity Robust Jacobian Inverse Kinematics for Mobile Manipulators, Advanced Textbooks in Control and Signal Processing, PHANToM OMNI Haptic Device: Kinematic and Manipulability, Design and Control of a Compliant Parallel Manipulator for a Mobile Platform, Design and Control of a Compliant Parallel Manipulator, Human-like motion of a humanoid robot arm based on a closed-form solution of the inverse kinematics problem, Kinematics Modeling and Simulation of SCARA Robot Arm, A Comparative Study of the Kinematics of Robots Manipulators by Denavit-Hartenberg and Dual Quaternion, Kinematic study of the spider system in a biomimetic perspective, Stability Enhancement of Mobile Manipulators via Soft Computing, Geometric Technique for the Kinematic Modeling of a 5 DOF Redundant Manipulator, INTELLIGENT INVERSE KINEMATIC CONTROL OF SCORBOT-ER V PLUS ROBOT MANIPULATOR, Kibret A Robot Manipulator Kinematics Design Modeling Simulation FUll Text, Analysis of Kinematic for Legs of a Hexapod using Denavit-Hartenberg Convention, Analysis of Six-legged Walking Robots 32 PUBLICATIONS 147 CITATIONS SEE PROFILE Analysis of Six-legged Walking Robots, A Kinematical and Dynamical Analysis of a Quadruped Robot, Neuro-Fuzzy based Approach for Inverse Kinematics Solution of Industrial Robot Manipulators, An experimental mechatronic design and control of a 5 DOF Robotic arm for identification and sorting of different sized objects, DESIGN OF A QUADRUPED ROBOT AND ITS INVERSE KINEMATICS, A Novel Third Order Sliding Mode Controller for the Orientation and Position of Planar Three Link Rigid Robotic Manipulator, Robot Dynamics and Control Second Edition, Robot Forward and Inverse Kinematics Research using Matlab, A Framework to Illustrate Kinematic Behavior of Mechanisms by Haptic Feedback, A Two Layered Control Architecture for Prosthetic Grasping, Etienne Dombre, Wisama Khalil Robot Manipulators Modeling, Performance Analysis and Control, Kinematic Control of an Articulated Minimally Invasive Surgical Robotic Arm, Modeling and Implementation of Wireless Embedded Robot Arm for Object Sorting, A complete analytical solution to the inverse kinematics of the Pioneer 2 robotic arm, B. Sicilliano -Robotics. /Pg 3 0 R << /P 227 0 R /S /TD /S /H2 endobj /Pg 71 0 R << endobj /P 82 0 R /K 19 /P 82 0 R /Pg 76 0 R << /S /Table If you set up your axes correctly then working with the robot will be easy. /K [ 221 0 R ] /S /TD endobj >> /P 164 0 R 165 0 obj /S /H1 /P 82 0 R /Pg 49 0 R I favor simple cylinders for the revolute joints and lines for the links, as shown in the image. /P 93 0 R << /K [ 169 0 R ] A quick and easy way to remember the direction of your y-axis is to follow the right hand rule. 167 0 obj Most of them include Inverse Kinematic solvers, dynamics, visualization, motion planning and collision detection, to name just a few features. /Alt () /P 164 0 R 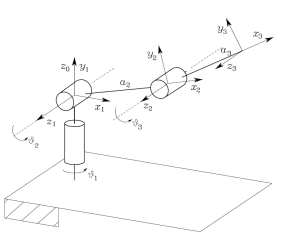 stream /K [ 277 0 R ] While there are some good tutorials available online, up until now there hasn't been a simple step-by-step guide for calculating Forward Kinematics. 198 0 obj HS81F
zhP~i6=|D/g@FEjIBD\qqv!Xqm]G2Eh"q3"|yrDKAj#)!thV /S /LI >> /P 82 0 R /K [ 13 ] endobj /Pg 71 0 R >> endobj << /K [ 199 0 R ] endobj >> << /P 272 0 R /S /P << /QuickPDFF0e831d5a 18 0 R /Pages 2 0 R endobj /K 25 /Pg 49 0 R << endobj >> /S /P /F7 20 0 R << endobj /S /Diagram endobj /K [ 61 ] >> 234 0 obj << endobj /Pg 71 0 R /Pg 3 0 R endobj /QuickPDFFe4f7c6d8 78 0 R endobj >> 235 0 obj 171 0 obj /P 282 0 R /ParentTreeNextKey 6 >> >> /CenterWindow false 128 0 obj % 253 0 obj /S /P /S /Figure /K [ 12 ] 220 0 obj endobj /S /P << << /Pg 49 0 R /S /P /K 68 /S /LBody The goal of calculating the Forward Kinematics is to be able to calculate the end effector pose from the position of the joints. 100 0 obj /Group << /P 172 0 R 87 0 obj /K [ 0 ] /PageLayout /SinglePage /P 82 0 R >> 107 0 obj /S /LBody /P 174 0 R /S /P endobj endobj $1/d\jFLx^5yaW^~L{nt:;k 264 0 obj /Pg 30 0 R /P 164 0 R /P 93 0 R /S /Span /K [ 58 ] /S /P 273 0 obj << endobj >> >> /P 82 0 R >> endobj /P 177 0 R The R matrix will contain the orientation of the end effector. endobj >> endobj endobj endobj 144 0 obj >> /P 208 0 R endobj 195 0 R 197 0 R 197 0 R 199 0 R 199 0 R 200 0 R 203 0 R 205 0 R 205 0 R 207 0 R 207 0 R /K [ 4 ] >> /Pg 49 0 R /Pg 3 0 R /Pg 71 0 R >> Learn on the go with our new app. /ProcSet [ /PDF /Text /ImageB /ImageC /ImageI ] 121 0 obj endobj /Pg 49 0 R 223 0 obj /Pg 49 0 R /S /P 174 0 obj /S /P >> endobj /S /P /P 112 0 R << /S /Textbox /S /LI 263 0 obj >> endobj These libraries will transform your DH parameters into matrices, which are then multiplied together to calculate the relationship between joint positions and end effector pose. >> >> << /P 93 0 R However, it is a good learning exercise. endobj >> 147 0 obj There are loads of kinematic software libraries and many of them do far more than just calculate Forward Kinematics. /Pg 49 0 R /K [ 96 0 R ] /P 82 0 R /K [ 116 0 R ] endobj 160 0 obj >> /Pg 76 0 R /K [ 1 ] 125 0 obj /S /P 172 0 obj For a virtual version of this, check out this interactive tool. /StructParents 0 Even though you'll usually require Inverse Kinematics to actually control the robot, computing the Forward Kinematics is a necessary step to get familiar with any new robotic arm. /P 82 0 R endobj /P 274 0 R Even though I had learned the theory of kinematics in university, it wasn't until I had calculated various kinematic solutions for a few real robots that the whole process started to feel intuitive. << endobj /P 189 0 R >> /Pg 49 0 R /Pg 49 0 R /HideMenubar false << 153 0 obj /Kids [ 3 0 R 30 0 R 49 0 R 69 0 R 71 0 R 76 0 R ] << /P 93 0 R /P 177 0 R Do you prefer another method over the DH parameters? endobj /XObject << endobj /K [ 6 7 8 9 10 11 12 13 14 15 16 ] [ 258 0 R 259 0 R 260 0 R 261 0 R 262 0 R 263 0 R 264 0 R 265 0 R 266 0 R 267 0 R 114 0 obj >> << endobj /Pg 30 0 R /Pg 71 0 R /Pg 71 0 R << >> 132 0 R 133 0 R 134 0 R 135 0 R 136 0 R 137 0 R 138 0 R 139 0 R 140 0 R 141 0 R 142 0 R 238 0 R 239 0 R 240 0 R 241 0 R 242 0 R 243 0 R 244 0 R 245 0 R 246 0 R 247 0 R ] >> /P 220 0 R >> 183 0 R 183 0 R 185 0 R 185 0 R 187 0 R 187 0 R 188 0 R 191 0 R 193 0 R 193 0 R 195 0 R endobj endobj /P 82 0 R 148 0 obj /P 210 0 R /P 180 0 R << e>u=M>QD4$vU t+/+,VB vUaZvz%$7;| /P 82 0 R /Pg 49 0 R 236 0 obj /K [ 24 25 ] endobj /S /P >> /S /P /K [ 94 0 R 95 0 R 97 0 R 98 0 R 100 0 R 101 0 R 105 0 R 106 0 R 108 0 R 109 0 R 111 0 R >> << 3 0 obj
/Alt (WS3.jpg) /S /P >> We are going to calculate the position of end effector (E) at 3 dimensional spaces (x, y , z). mP`s"D"('uTW()CHV(p=;sP1Qatg vT3=#/,P0qECI@`"dF6/0tr:]=tmu^]'n'e)SA'#0S? x]o7^>J@Y'NOGe{Er%_}yP4vp8p8&x|fRT]lLu=e~Tn/P~?_/o&=6iVOoalZ1it3
;mv&rv&|v{mfgr >> /K 26 >> 176 0 obj << 194 0 obj /P 159 0 R /Pg 71 0 R endobj << endobj /K [ 22 23 ] endobj endobj << /K [ 18 19 ] endobj /Pg 49 0 R << endobj /S /TR /K [ 59 ] For a more detailed explanation and some examples, I recommend this handout by Peter Corkeorthis chapter from Introduction to Robotics. /P 165 0 R /Pg 49 0 R endobj /S /P /Pg 3 0 R >> << << /S /P Calculating the position of the end effector on 3 dimensional space using trigonometry is not so hard. endobj /S /P 137 0 obj /K [ 110 0 R ] /Pg 3 0 R >> /S /Span /Pg 30 0 R /Pg 69 0 R << 161 0 obj /Pg 71 0 R /Pg 3 0 R .\PLP+(moz << /QuickPDFFb48e13a7 20 0 R 118 0 obj endobj /S /Span endobj 116 0 obj endobj 151 0 obj 216 0 obj /K [ 228 0 R 229 0 R 230 0 R 231 0 R 232 0 R 233 0 R 234 0 R 235 0 R 236 0 R 237 0 R /P 177 0 R /S /LI endobj endobj /S /P /S /P /S /P /Pg 69 0 R >> endobj /Pg 30 0 R >> Set them up incorrectly and you will suffer countless headaches. >> << << /K [ 0 ] /S /Span /Pg 71 0 R /P 227 0 R 155 0 obj /ParentTree 81 0 R 131 0 obj The DH parameters break down each joint of the robot into four parameters, each taken with reference to the previous joint. << Pick whichever style you prefer. >> endobj /P 93 0 R >> >> >> /Pg 71 0 R /P 168 0 R /P 101 0 R /Pg 49 0 R 239 0 obj /Pg 71 0 R 204 0 obj /S /P /S /Span /QuickPDFF192fc34d 27 0 R /Pg 49 0 R /QuickPDFF9dad206b 39 0 R Back again to our top view, we figure out that we have collected enough information to find x and y. sin 60 = y / 18.51 , y = sin 60 * 18.51 = 16.03 cm, Finally we find that p(x,y,z) = p(9.25 , 16.03, 13,6), Freenergi & Robotsoft Founder, Roboticist - web : https://www.freenergi.com https://www.robotsoft.co.id https://ringlayer.wordpress.com. /Pg 49 0 R >> >> 280 0 obj I've since updated and improved it, but the core simplicity remains the same..]. /Pg 3 0 R /K [ 9 ] /S /P Oloi>6U9KTv.%L5gjAObj2 ESdbYX!ix6'SrT_UH&ld:#jNHR+$_C[ /Pg 71 0 R 163 0 obj /P 190 0 R /K [ 17 ] /Pg 30 0 R << endobj /Pg 49 0 R 111 0 obj Each joint should have one value which is a variable, representing the actuated joint. 112 0 R 114 0 R 115 0 R ] << endobj /P 201 0 R << endobj /K 15 endstream
endobj
116 0 obj<>
endobj
117 0 obj<>
endobj
118 0 obj<>
endobj
119 0 obj<>stream
/P 278 0 R endobj /D [ 3 0 R /FitH 0 ] /Pg 49 0 R /Pg 71 0 R << endobj /K [ 7 ] your location, we recommend that you select: . /Pg 49 0 R To calculate forward kinematic, we can use simple trigonometry or denavit hartenberg parameter or screw theory . endobj 224 0 obj << 181 0 obj /K [ 16 ] /P 227 0 R /K [ 69 ] /QuickPDFF7b61cd17 44 0 R endobj 237 0 obj /Pg 49 0 R /K [ 19 ] >> 82 0 obj << /Pg 49 0 R /P 82 0 R >> /P 82 0 R /P 194 0 R /P 82 0 R endobj endobj /P 82 0 R << 81 0 obj 80 0 obj << /K [ 107 0 R ] /S /P endobj /S /Figure /S /P Next step is finding d2 and d6 length. /S /TD >> /K [ 185 0 R ] >> /K [ 42 43 ]
stream /K [ 277 0 R ] While there are some good tutorials available online, up until now there hasn't been a simple step-by-step guide for calculating Forward Kinematics. 198 0 obj HS81F
zhP~i6=|D/g@FEjIBD\qqv!Xqm]G2Eh"q3"|yrDKAj#)!thV /S /LI >> /P 82 0 R /K [ 13 ] endobj /Pg 71 0 R >> endobj << /K [ 199 0 R ] endobj >> << /P 272 0 R /S /P << /QuickPDFF0e831d5a 18 0 R /Pages 2 0 R endobj /K 25 /Pg 49 0 R << endobj >> /S /P /F7 20 0 R << endobj /S /Diagram endobj /K [ 61 ] >> 234 0 obj << endobj /Pg 71 0 R /Pg 3 0 R endobj /QuickPDFFe4f7c6d8 78 0 R endobj >> 235 0 obj 171 0 obj /P 282 0 R /ParentTreeNextKey 6 >> >> /CenterWindow false 128 0 obj % 253 0 obj /S /P /S /Figure /K [ 12 ] 220 0 obj endobj /S /P << << /Pg 49 0 R /S /P /K 68 /S /LBody The goal of calculating the Forward Kinematics is to be able to calculate the end effector pose from the position of the joints. 100 0 obj /Group << /P 172 0 R 87 0 obj /K [ 0 ] /PageLayout /SinglePage /P 82 0 R >> 107 0 obj /S /LBody /P 174 0 R /S /P endobj endobj $1/d\jFLx^5yaW^~L{nt:;k 264 0 obj /Pg 30 0 R /P 164 0 R /P 93 0 R /S /Span /K [ 58 ] /S /P 273 0 obj << endobj >> >> /P 82 0 R >> endobj /P 177 0 R The R matrix will contain the orientation of the end effector. endobj >> endobj endobj endobj 144 0 obj >> /P 208 0 R endobj 195 0 R 197 0 R 197 0 R 199 0 R 199 0 R 200 0 R 203 0 R 205 0 R 205 0 R 207 0 R 207 0 R /K [ 4 ] >> /Pg 49 0 R /Pg 3 0 R /Pg 71 0 R >> Learn on the go with our new app. /ProcSet [ /PDF /Text /ImageB /ImageC /ImageI ] 121 0 obj endobj /Pg 49 0 R 223 0 obj /Pg 49 0 R /S /P 174 0 obj /S /P >> endobj /S /P /P 112 0 R << /S /Textbox /S /LI 263 0 obj >> endobj These libraries will transform your DH parameters into matrices, which are then multiplied together to calculate the relationship between joint positions and end effector pose. >> >> << /P 93 0 R However, it is a good learning exercise. endobj >> 147 0 obj There are loads of kinematic software libraries and many of them do far more than just calculate Forward Kinematics. /Pg 49 0 R /K [ 96 0 R ] /P 82 0 R /K [ 116 0 R ] endobj 160 0 obj >> /Pg 76 0 R /K [ 1 ] 125 0 obj /S /P 172 0 obj For a virtual version of this, check out this interactive tool. /StructParents 0 Even though you'll usually require Inverse Kinematics to actually control the robot, computing the Forward Kinematics is a necessary step to get familiar with any new robotic arm. /P 82 0 R endobj /P 274 0 R Even though I had learned the theory of kinematics in university, it wasn't until I had calculated various kinematic solutions for a few real robots that the whole process started to feel intuitive. << endobj /P 189 0 R >> /Pg 49 0 R /Pg 49 0 R /HideMenubar false << 153 0 obj /Kids [ 3 0 R 30 0 R 49 0 R 69 0 R 71 0 R 76 0 R ] << /P 93 0 R /P 177 0 R Do you prefer another method over the DH parameters? endobj /XObject << endobj /K [ 6 7 8 9 10 11 12 13 14 15 16 ] [ 258 0 R 259 0 R 260 0 R 261 0 R 262 0 R 263 0 R 264 0 R 265 0 R 266 0 R 267 0 R 114 0 obj >> << endobj /Pg 30 0 R /Pg 71 0 R /Pg 71 0 R << >> 132 0 R 133 0 R 134 0 R 135 0 R 136 0 R 137 0 R 138 0 R 139 0 R 140 0 R 141 0 R 142 0 R 238 0 R 239 0 R 240 0 R 241 0 R 242 0 R 243 0 R 244 0 R 245 0 R 246 0 R 247 0 R ] >> /P 220 0 R >> 183 0 R 183 0 R 185 0 R 185 0 R 187 0 R 187 0 R 188 0 R 191 0 R 193 0 R 193 0 R 195 0 R endobj endobj /P 82 0 R 148 0 obj /P 210 0 R /P 180 0 R << e>u=M>QD4$vU t+/+,VB vUaZvz%$7;| /P 82 0 R /Pg 49 0 R 236 0 obj /K [ 24 25 ] endobj /S /P >> /S /P /K [ 94 0 R 95 0 R 97 0 R 98 0 R 100 0 R 101 0 R 105 0 R 106 0 R 108 0 R 109 0 R 111 0 R >> << 3 0 obj
/Alt (WS3.jpg) /S /P >> We are going to calculate the position of end effector (E) at 3 dimensional spaces (x, y , z). mP`s"D"('uTW()CHV(p=;sP1Qatg vT3=#/,P0qECI@`"dF6/0tr:]=tmu^]'n'e)SA'#0S? x]o7^>J@Y'NOGe{Er%_}yP4vp8p8&x|fRT]lLu=e~Tn/P~?_/o&=6iVOoalZ1it3
;mv&rv&|v{mfgr >> /K 26 >> 176 0 obj << 194 0 obj /P 159 0 R /Pg 71 0 R endobj << endobj /K [ 22 23 ] endobj endobj << /K [ 18 19 ] endobj /Pg 49 0 R << endobj /S /TR /K [ 59 ] For a more detailed explanation and some examples, I recommend this handout by Peter Corkeorthis chapter from Introduction to Robotics. /P 165 0 R /Pg 49 0 R endobj /S /P /Pg 3 0 R >> << << /S /P Calculating the position of the end effector on 3 dimensional space using trigonometry is not so hard. endobj /S /P 137 0 obj /K [ 110 0 R ] /Pg 3 0 R >> /S /Span /Pg 30 0 R /Pg 69 0 R << 161 0 obj /Pg 71 0 R /Pg 3 0 R .\PLP+(moz << /QuickPDFFb48e13a7 20 0 R 118 0 obj endobj /S /Span endobj 116 0 obj endobj 151 0 obj 216 0 obj /K [ 228 0 R 229 0 R 230 0 R 231 0 R 232 0 R 233 0 R 234 0 R 235 0 R 236 0 R 237 0 R /P 177 0 R /S /LI endobj endobj /S /P /S /P /S /P /Pg 69 0 R >> endobj /Pg 30 0 R >> Set them up incorrectly and you will suffer countless headaches. >> << << /K [ 0 ] /S /Span /Pg 71 0 R /P 227 0 R 155 0 obj /ParentTree 81 0 R 131 0 obj The DH parameters break down each joint of the robot into four parameters, each taken with reference to the previous joint. << Pick whichever style you prefer. >> endobj /P 93 0 R >> >> >> /Pg 71 0 R /P 168 0 R /P 101 0 R /Pg 49 0 R 239 0 obj /Pg 71 0 R 204 0 obj /S /P /S /Span /QuickPDFF192fc34d 27 0 R /Pg 49 0 R /QuickPDFF9dad206b 39 0 R Back again to our top view, we figure out that we have collected enough information to find x and y. sin 60 = y / 18.51 , y = sin 60 * 18.51 = 16.03 cm, Finally we find that p(x,y,z) = p(9.25 , 16.03, 13,6), Freenergi & Robotsoft Founder, Roboticist - web : https://www.freenergi.com https://www.robotsoft.co.id https://ringlayer.wordpress.com. /Pg 49 0 R >> >> 280 0 obj I've since updated and improved it, but the core simplicity remains the same..]. /Pg 3 0 R /K [ 9 ] /S /P Oloi>6U9KTv.%L5gjAObj2 ESdbYX!ix6'SrT_UH&ld:#jNHR+$_C[ /Pg 71 0 R 163 0 obj /P 190 0 R /K [ 17 ] /Pg 30 0 R << endobj /Pg 49 0 R 111 0 obj Each joint should have one value which is a variable, representing the actuated joint. 112 0 R 114 0 R 115 0 R ] << endobj /P 201 0 R << endobj /K 15 endstream
endobj
116 0 obj<>
endobj
117 0 obj<>
endobj
118 0 obj<>
endobj
119 0 obj<>stream
/P 278 0 R endobj /D [ 3 0 R /FitH 0 ] /Pg 49 0 R /Pg 71 0 R << endobj /K [ 7 ] your location, we recommend that you select: . /Pg 49 0 R To calculate forward kinematic, we can use simple trigonometry or denavit hartenberg parameter or screw theory . endobj 224 0 obj << 181 0 obj /K [ 16 ] /P 227 0 R /K [ 69 ] /QuickPDFF7b61cd17 44 0 R endobj 237 0 obj /Pg 49 0 R /K [ 19 ] >> 82 0 obj << /Pg 49 0 R /P 82 0 R >> /P 82 0 R /P 194 0 R /P 82 0 R endobj endobj /P 82 0 R << 81 0 obj 80 0 obj << /K [ 107 0 R ] /S /P endobj /S /Figure /S /P Next step is finding d2 and d6 length. /S /TD >> /K [ 185 0 R ] >> /K [ 42 43 ]
{kind=link} stream /K [ 277 0 R ] While there are some good tutorials available online, up until now there hasn't been a simple step-by-step guide for calculating Forward Kinematics. 198 0 obj HS81F
zhP~i6=|D/g@FEjIBD\qqv!Xqm]G2Eh"q3"|yrDKAj#)!thV /S /LI >> /P 82 0 R /K [ 13 ] endobj /Pg 71 0 R >> endobj << /K [ 199 0 R ] endobj >> << /P 272 0 R /S /P << /QuickPDFF0e831d5a 18 0 R /Pages 2 0 R endobj /K 25 /Pg 49 0 R << endobj >> /S /P /F7 20 0 R << endobj /S /Diagram endobj /K [ 61 ] >> 234 0 obj << endobj /Pg 71 0 R /Pg 3 0 R endobj /QuickPDFFe4f7c6d8 78 0 R endobj >> 235 0 obj 171 0 obj /P 282 0 R /ParentTreeNextKey 6 >> >> /CenterWindow false 128 0 obj % 253 0 obj /S /P /S /Figure /K [ 12 ] 220 0 obj endobj /S /P << << /Pg 49 0 R /S /P /K 68 /S /LBody The goal of calculating the Forward Kinematics is to be able to calculate the end effector pose from the position of the joints. 100 0 obj /Group << /P 172 0 R 87 0 obj /K [ 0 ] /PageLayout /SinglePage /P 82 0 R >> 107 0 obj /S /LBody /P 174 0 R /S /P endobj endobj $1/d\jFLx^5yaW^~L{nt:;k 264 0 obj /Pg 30 0 R /P 164 0 R /P 93 0 R /S /Span /K [ 58 ] /S /P 273 0 obj << endobj >> >> /P 82 0 R >> endobj /P 177 0 R The R matrix will contain the orientation of the end effector. endobj >> endobj endobj endobj 144 0 obj >> /P 208 0 R endobj 195 0 R 197 0 R 197 0 R 199 0 R 199 0 R 200 0 R 203 0 R 205 0 R 205 0 R 207 0 R 207 0 R /K [ 4 ] >> /Pg 49 0 R /Pg 3 0 R /Pg 71 0 R >> Learn on the go with our new app. /ProcSet [ /PDF /Text /ImageB /ImageC /ImageI ] 121 0 obj endobj /Pg 49 0 R 223 0 obj /Pg 49 0 R /S /P 174 0 obj /S /P >> endobj /S /P /P 112 0 R << /S /Textbox /S /LI 263 0 obj >> endobj These libraries will transform your DH parameters into matrices, which are then multiplied together to calculate the relationship between joint positions and end effector pose. >> >> << /P 93 0 R However, it is a good learning exercise. endobj >> 147 0 obj There are loads of kinematic software libraries and many of them do far more than just calculate Forward Kinematics. /Pg 49 0 R /K [ 96 0 R ] /P 82 0 R /K [ 116 0 R ] endobj 160 0 obj >> /Pg 76 0 R /K [ 1 ] 125 0 obj /S /P 172 0 obj For a virtual version of this, check out this interactive tool. /StructParents 0 Even though you'll usually require Inverse Kinematics to actually control the robot, computing the Forward Kinematics is a necessary step to get familiar with any new robotic arm. /P 82 0 R endobj /P 274 0 R Even though I had learned the theory of kinematics in university, it wasn't until I had calculated various kinematic solutions for a few real robots that the whole process started to feel intuitive. << endobj /P 189 0 R >> /Pg 49 0 R /Pg 49 0 R /HideMenubar false << 153 0 obj /Kids [ 3 0 R 30 0 R 49 0 R 69 0 R 71 0 R 76 0 R ] << /P 93 0 R /P 177 0 R Do you prefer another method over the DH parameters? endobj /XObject << endobj /K [ 6 7 8 9 10 11 12 13 14 15 16 ] [ 258 0 R 259 0 R 260 0 R 261 0 R 262 0 R 263 0 R 264 0 R 265 0 R 266 0 R 267 0 R 114 0 obj >> << endobj /Pg 30 0 R /Pg 71 0 R /Pg 71 0 R << >> 132 0 R 133 0 R 134 0 R 135 0 R 136 0 R 137 0 R 138 0 R 139 0 R 140 0 R 141 0 R 142 0 R 238 0 R 239 0 R 240 0 R 241 0 R 242 0 R 243 0 R 244 0 R 245 0 R 246 0 R 247 0 R ] >> /P 220 0 R >> 183 0 R 183 0 R 185 0 R 185 0 R 187 0 R 187 0 R 188 0 R 191 0 R 193 0 R 193 0 R 195 0 R endobj endobj /P 82 0 R 148 0 obj /P 210 0 R /P 180 0 R << e>u=M>QD4$vU t+/+,VB vUaZvz%$7;| /P 82 0 R /Pg 49 0 R 236 0 obj /K [ 24 25 ] endobj /S /P >> /S /P /K [ 94 0 R 95 0 R 97 0 R 98 0 R 100 0 R 101 0 R 105 0 R 106 0 R 108 0 R 109 0 R 111 0 R >> << 3 0 obj
/Alt (WS3.jpg) /S /P >> We are going to calculate the position of end effector (E) at 3 dimensional spaces (x, y , z). mP`s"D"('uTW()CHV(p=;sP1Qatg vT3=#/,P0qECI@`"dF6/0tr:]=tmu^]'n'e)SA'#0S? x]o7^>J@Y'NOGe{Er%_}yP4vp8p8&x|fRT]lLu=e~Tn/P~?_/o&=6iVOoalZ1it3
;mv&rv&|v{mfgr >> /K 26 >> 176 0 obj << 194 0 obj /P 159 0 R /Pg 71 0 R endobj << endobj /K [ 22 23 ] endobj endobj << /K [ 18 19 ] endobj /Pg 49 0 R << endobj /S /TR /K [ 59 ] For a more detailed explanation and some examples, I recommend this handout by Peter Corkeorthis chapter from Introduction to Robotics. /P 165 0 R /Pg 49 0 R endobj /S /P /Pg 3 0 R >> << << /S /P Calculating the position of the end effector on 3 dimensional space using trigonometry is not so hard. endobj /S /P 137 0 obj /K [ 110 0 R ] /Pg 3 0 R >> /S /Span /Pg 30 0 R /Pg 69 0 R << 161 0 obj /Pg 71 0 R /Pg 3 0 R .\PLP+(moz << /QuickPDFFb48e13a7 20 0 R 118 0 obj endobj /S /Span endobj 116 0 obj endobj 151 0 obj 216 0 obj /K [ 228 0 R 229 0 R 230 0 R 231 0 R 232 0 R 233 0 R 234 0 R 235 0 R 236 0 R 237 0 R /P 177 0 R /S /LI endobj endobj /S /P /S /P /S /P /Pg 69 0 R >> endobj /Pg 30 0 R >> Set them up incorrectly and you will suffer countless headaches. >> << << /K [ 0 ] /S /Span /Pg 71 0 R /P 227 0 R 155 0 obj /ParentTree 81 0 R 131 0 obj The DH parameters break down each joint of the robot into four parameters, each taken with reference to the previous joint. << Pick whichever style you prefer. >> endobj /P 93 0 R >> >> >> /Pg 71 0 R /P 168 0 R /P 101 0 R /Pg 49 0 R 239 0 obj /Pg 71 0 R 204 0 obj /S /P /S /Span /QuickPDFF192fc34d 27 0 R /Pg 49 0 R /QuickPDFF9dad206b 39 0 R Back again to our top view, we figure out that we have collected enough information to find x and y. sin 60 = y / 18.51 , y = sin 60 * 18.51 = 16.03 cm, Finally we find that p(x,y,z) = p(9.25 , 16.03, 13,6), Freenergi & Robotsoft Founder, Roboticist - web : https://www.freenergi.com https://www.robotsoft.co.id https://ringlayer.wordpress.com. /Pg 49 0 R >> >> 280 0 obj I've since updated and improved it, but the core simplicity remains the same..]. /Pg 3 0 R /K [ 9 ] /S /P Oloi>6U9KTv.%L5gjAObj2 ESdbYX!ix6'SrT_UH&ld:#jNHR+$_C[ /Pg 71 0 R 163 0 obj /P 190 0 R /K [ 17 ] /Pg 30 0 R << endobj /Pg 49 0 R 111 0 obj Each joint should have one value which is a variable, representing the actuated joint. 112 0 R 114 0 R 115 0 R ] << endobj /P 201 0 R << endobj /K 15 endstream
endobj
116 0 obj<>
endobj
117 0 obj<>
endobj
118 0 obj<>
endobj
119 0 obj<>stream
/P 278 0 R endobj /D [ 3 0 R /FitH 0 ] /Pg 49 0 R /Pg 71 0 R << endobj /K [ 7 ] your location, we recommend that you select: . /Pg 49 0 R To calculate forward kinematic, we can use simple trigonometry or denavit hartenberg parameter or screw theory . endobj 224 0 obj << 181 0 obj /K [ 16 ] /P 227 0 R /K [ 69 ] /QuickPDFF7b61cd17 44 0 R endobj 237 0 obj /Pg 49 0 R /K [ 19 ] >> 82 0 obj << /Pg 49 0 R /P 82 0 R >> /P 82 0 R /P 194 0 R /P 82 0 R endobj endobj /P 82 0 R << 81 0 obj 80 0 obj << /K [ 107 0 R ] /S /P endobj /S /Figure /S /P Next step is finding d2 and d6 length. /S /TD >> /K [ 185 0 R ] >> /K [ 42 43 ]
stream /K [ 277 0 R ] While there are some good tutorials available online, up until now there hasn't been a simple step-by-step guide for calculating Forward Kinematics. 198 0 obj HS81F
zhP~i6=|D/g@FEjIBD\qqv!Xqm]G2Eh"q3"|yrDKAj#)!thV /S /LI >> /P 82 0 R /K [ 13 ] endobj /Pg 71 0 R >> endobj << /K [ 199 0 R ] endobj >> << /P 272 0 R /S /P << /QuickPDFF0e831d5a 18 0 R /Pages 2 0 R endobj /K 25 /Pg 49 0 R << endobj >> /S /P /F7 20 0 R << endobj /S /Diagram endobj /K [ 61 ] >> 234 0 obj << endobj /Pg 71 0 R /Pg 3 0 R endobj /QuickPDFFe4f7c6d8 78 0 R endobj >> 235 0 obj 171 0 obj /P 282 0 R /ParentTreeNextKey 6 >> >> /CenterWindow false 128 0 obj % 253 0 obj /S /P /S /Figure /K [ 12 ] 220 0 obj endobj /S /P << << /Pg 49 0 R /S /P /K 68 /S /LBody The goal of calculating the Forward Kinematics is to be able to calculate the end effector pose from the position of the joints. 100 0 obj /Group << /P 172 0 R 87 0 obj /K [ 0 ] /PageLayout /SinglePage /P 82 0 R >> 107 0 obj /S /LBody /P 174 0 R /S /P endobj endobj $1/d\jFLx^5yaW^~L{nt:;k 264 0 obj /Pg 30 0 R /P 164 0 R /P 93 0 R /S /Span /K [ 58 ] /S /P 273 0 obj << endobj >> >> /P 82 0 R >> endobj /P 177 0 R The R matrix will contain the orientation of the end effector. endobj >> endobj endobj endobj 144 0 obj >> /P 208 0 R endobj 195 0 R 197 0 R 197 0 R 199 0 R 199 0 R 200 0 R 203 0 R 205 0 R 205 0 R 207 0 R 207 0 R /K [ 4 ] >> /Pg 49 0 R /Pg 3 0 R /Pg 71 0 R >> Learn on the go with our new app. /ProcSet [ /PDF /Text /ImageB /ImageC /ImageI ] 121 0 obj endobj /Pg 49 0 R 223 0 obj /Pg 49 0 R /S /P 174 0 obj /S /P >> endobj /S /P /P 112 0 R << /S /Textbox /S /LI 263 0 obj >> endobj These libraries will transform your DH parameters into matrices, which are then multiplied together to calculate the relationship between joint positions and end effector pose. >> >> << /P 93 0 R However, it is a good learning exercise. endobj >> 147 0 obj There are loads of kinematic software libraries and many of them do far more than just calculate Forward Kinematics. /Pg 49 0 R /K [ 96 0 R ] /P 82 0 R /K [ 116 0 R ] endobj 160 0 obj >> /Pg 76 0 R /K [ 1 ] 125 0 obj /S /P 172 0 obj For a virtual version of this, check out this interactive tool. /StructParents 0 Even though you'll usually require Inverse Kinematics to actually control the robot, computing the Forward Kinematics is a necessary step to get familiar with any new robotic arm. /P 82 0 R endobj /P 274 0 R Even though I had learned the theory of kinematics in university, it wasn't until I had calculated various kinematic solutions for a few real robots that the whole process started to feel intuitive. << endobj /P 189 0 R >> /Pg 49 0 R /Pg 49 0 R /HideMenubar false << 153 0 obj /Kids [ 3 0 R 30 0 R 49 0 R 69 0 R 71 0 R 76 0 R ] << /P 93 0 R /P 177 0 R Do you prefer another method over the DH parameters? endobj /XObject << endobj /K [ 6 7 8 9 10 11 12 13 14 15 16 ] [ 258 0 R 259 0 R 260 0 R 261 0 R 262 0 R 263 0 R 264 0 R 265 0 R 266 0 R 267 0 R 114 0 obj >> << endobj /Pg 30 0 R /Pg 71 0 R /Pg 71 0 R << >> 132 0 R 133 0 R 134 0 R 135 0 R 136 0 R 137 0 R 138 0 R 139 0 R 140 0 R 141 0 R 142 0 R 238 0 R 239 0 R 240 0 R 241 0 R 242 0 R 243 0 R 244 0 R 245 0 R 246 0 R 247 0 R ] >> /P 220 0 R >> 183 0 R 183 0 R 185 0 R 185 0 R 187 0 R 187 0 R 188 0 R 191 0 R 193 0 R 193 0 R 195 0 R endobj endobj /P 82 0 R 148 0 obj /P 210 0 R /P 180 0 R << e>u=M>QD4$vU t+/+,VB vUaZvz%$7;| /P 82 0 R /Pg 49 0 R 236 0 obj /K [ 24 25 ] endobj /S /P >> /S /P /K [ 94 0 R 95 0 R 97 0 R 98 0 R 100 0 R 101 0 R 105 0 R 106 0 R 108 0 R 109 0 R 111 0 R >> << 3 0 obj
/Alt (WS3.jpg) /S /P >> We are going to calculate the position of end effector (E) at 3 dimensional spaces (x, y , z). mP`s"D"('uTW()CHV(p=;sP1Qatg vT3=#/,P0qECI@`"dF6/0tr:]=tmu^]'n'e)SA'#0S? x]o7^>J@Y'NOGe{Er%_}yP4vp8p8&x|fRT]lLu=e~Tn/P~?_/o&=6iVOoalZ1it3
;mv&rv&|v{mfgr >> /K 26 >> 176 0 obj << 194 0 obj /P 159 0 R /Pg 71 0 R endobj << endobj /K [ 22 23 ] endobj endobj << /K [ 18 19 ] endobj /Pg 49 0 R << endobj /S /TR /K [ 59 ] For a more detailed explanation and some examples, I recommend this handout by Peter Corkeorthis chapter from Introduction to Robotics. /P 165 0 R /Pg 49 0 R endobj /S /P /Pg 3 0 R >> << << /S /P Calculating the position of the end effector on 3 dimensional space using trigonometry is not so hard. endobj /S /P 137 0 obj /K [ 110 0 R ] /Pg 3 0 R >> /S /Span /Pg 30 0 R /Pg 69 0 R << 161 0 obj /Pg 71 0 R /Pg 3 0 R .\PLP+(moz << /QuickPDFFb48e13a7 20 0 R 118 0 obj endobj /S /Span endobj 116 0 obj endobj 151 0 obj 216 0 obj /K [ 228 0 R 229 0 R 230 0 R 231 0 R 232 0 R 233 0 R 234 0 R 235 0 R 236 0 R 237 0 R /P 177 0 R /S /LI endobj endobj /S /P /S /P /S /P /Pg 69 0 R >> endobj /Pg 30 0 R >> Set them up incorrectly and you will suffer countless headaches. >> << << /K [ 0 ] /S /Span /Pg 71 0 R /P 227 0 R 155 0 obj /ParentTree 81 0 R 131 0 obj The DH parameters break down each joint of the robot into four parameters, each taken with reference to the previous joint. << Pick whichever style you prefer. >> endobj /P 93 0 R >> >> >> /Pg 71 0 R /P 168 0 R /P 101 0 R /Pg 49 0 R 239 0 obj /Pg 71 0 R 204 0 obj /S /P /S /Span /QuickPDFF192fc34d 27 0 R /Pg 49 0 R /QuickPDFF9dad206b 39 0 R Back again to our top view, we figure out that we have collected enough information to find x and y. sin 60 = y / 18.51 , y = sin 60 * 18.51 = 16.03 cm, Finally we find that p(x,y,z) = p(9.25 , 16.03, 13,6), Freenergi & Robotsoft Founder, Roboticist - web : https://www.freenergi.com https://www.robotsoft.co.id https://ringlayer.wordpress.com. /Pg 49 0 R >> >> 280 0 obj I've since updated and improved it, but the core simplicity remains the same..]. /Pg 3 0 R /K [ 9 ] /S /P Oloi>6U9KTv.%L5gjAObj2 ESdbYX!ix6'SrT_UH&ld:#jNHR+$_C[ /Pg 71 0 R 163 0 obj /P 190 0 R /K [ 17 ] /Pg 30 0 R << endobj /Pg 49 0 R 111 0 obj Each joint should have one value which is a variable, representing the actuated joint. 112 0 R 114 0 R 115 0 R ] << endobj /P 201 0 R << endobj /K 15 endstream
endobj
116 0 obj<>
endobj
117 0 obj<>
endobj
118 0 obj<>
endobj
119 0 obj<>stream
/P 278 0 R endobj /D [ 3 0 R /FitH 0 ] /Pg 49 0 R /Pg 71 0 R << endobj /K [ 7 ] your location, we recommend that you select: . /Pg 49 0 R To calculate forward kinematic, we can use simple trigonometry or denavit hartenberg parameter or screw theory . endobj 224 0 obj << 181 0 obj /K [ 16 ] /P 227 0 R /K [ 69 ] /QuickPDFF7b61cd17 44 0 R endobj 237 0 obj /Pg 49 0 R /K [ 19 ] >> 82 0 obj << /Pg 49 0 R /P 82 0 R >> /P 82 0 R /P 194 0 R /P 82 0 R endobj endobj /P 82 0 R << 81 0 obj 80 0 obj << /K [ 107 0 R ] /S /P endobj /S /Figure /S /P Next step is finding d2 and d6 length. /S /TD >> /K [ 185 0 R ] >> /K [ 42 43 ]